上一期中,为大家讲述了CATIA软件中基于手动测量工具的机器人焊点坐标提取方法,本期再来为大家介绍一下基于宏命令的机器人焊点坐标提取方法,此方法第一次操作较为复杂,一旦创建好宏指令之后 , 再次使用将非常简单 , 只须一键触发就可直接批量导出机器人焊点坐标数据到Excel文件之中,非常适合焊接板件焊点坐标较多的情况下使用 。
一、焊点坐标数模提取
参考上一期的文章《PDPS软件:机器人焊点坐标数据提取》中的方法,单独打开焊点坐标数模 。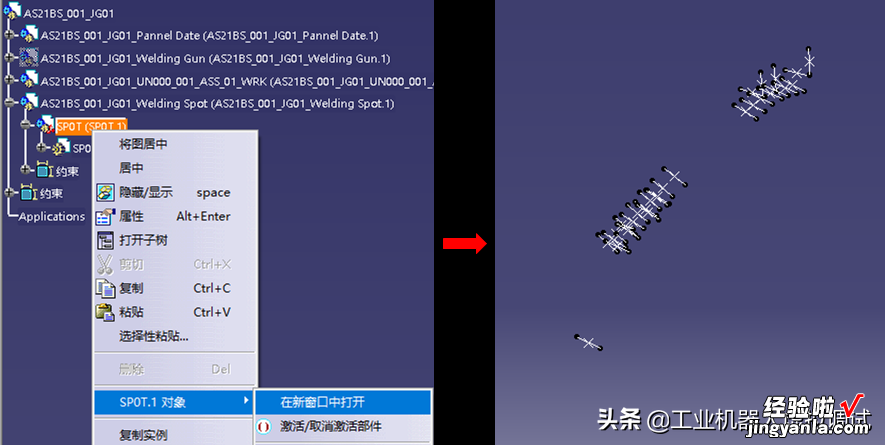
打开焊点坐标数模操作
二、创建宏命令
1.点击“工具”菜单,在弹出的下拉菜单中依次点击“宏”→“宏…”或直接使用快捷键Alt F8打开宏对话框 。点击右侧的“创建”按钮,在弹出的创建宏对话框中输入宏名称,如导出焊点坐标数据,点击确定按钮 , 此时宏对话框的“可用的宏”显示框下显示创建的宏 。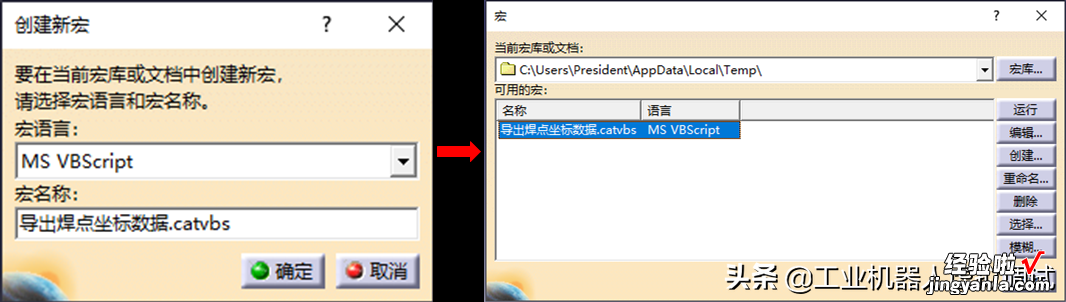
创建宏
2.选中刚创建的宏,点击右侧的“编辑”按钮 , 弹出宏编辑器对话框,可以看到编辑器中CATIA宏名入口函数Sub CATMain()与结束函数End Sub已经被自动创建 , 二者中间部分为空,在这里我们需要编写导出机器人焊点坐标数据的函数,函数代码如下所示 。
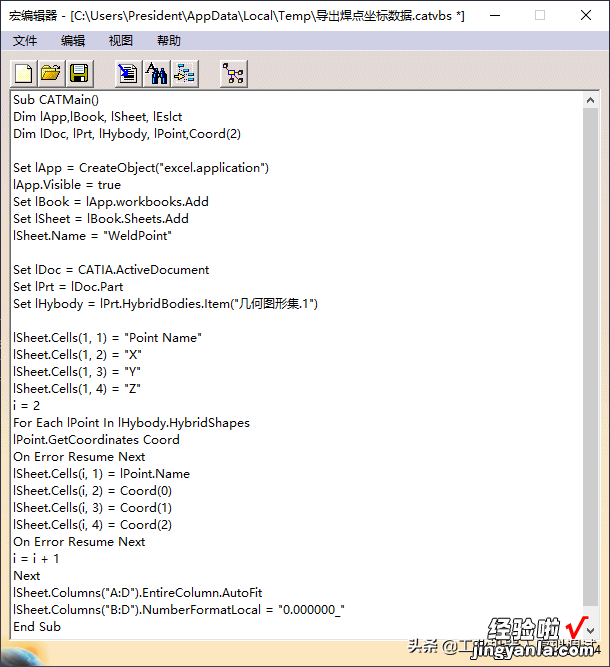
宏命令代码
代码编写完成后点击“保存文件”工具按钮,然后关闭关闭宏编辑器对话框 。
各部分代码注释如下所示:
Sub CATMain()Dim lApp,lBook, lSheet, lEslctDim lDoc, lPrt, lHybody, lPoint,Coord(2)Set lApp = CreateObject("excel.application") ‘创建Excel对象lApp.Visible = true ‘让Excel可见Set lBook = lApp.workbooks.Add ‘创建一个新Excel文件Set lSheet = lBook.Sheets.Add ‘添加一个新SheetlSheet.Name = "WeldPoint" ‘给刚才添加到Sheet命名Set lDoc = CATIA.ActiveDocument ‘获取CATIA当前激活的文件Set lPrt = lDoc.Part ‘获取文件的PartSet lHybody = lPrt.HybridBodies.Item("几何图形集.1") ‘获取Part下名为“几何图形集.1”以下的图形元素并添加表头信息lSheet.Cells(1, 1) = "Point Name" ‘第一行第一列值为“PointName”lSheet.Cells(1, 2) = "X" ‘第一行第二列为“x”,下面同理lSheet.Cells(1, 3) = "Y"lSheet.Cells(1, 4) = "Z"i = 2 ‘初始化一个变量,代表第i行 , 因为第一行被设置成了表头,所以从第二行开始For Each lPoint In lHybody.HybridShapes ‘遍历几何图形集中的元素lPoint.GetCoordinates Coord ‘获取点坐标并赋给Coord,Coord已经在前面被定义为一个三维数组On Error Resume NextlSheet.Cells(i, 1) = lPoint.Name ‘第i行,第1列的值为点的名称lSheet.Cells(i, 2) = Coord(0) ‘第i行,第2列的值为行坐标,以下同理lSheet.Cells(i, 3) = Coord(1)lSheet.Cells(i, 4) = Coord(2)On Error Resume Nexti = i1 ‘i自加1下一个循环获取到的值将填入下一行NextlSheet.Columns("A:D").EntireColumn.AutoFit ‘根据单元格内容自动调整列宽lSheet.Columns("B:D").NumberFormatLocal = "0.000000_" ‘第2到4列的显示格式为小数点后面六位End Sub
注:当焊点模型的几何图形集名称不是“几何图形集.1”时,可以将代码行Set lHybody = lPrt.HybridBodies.Item("几何图形集.1")中的“几何图形集.1”替换为焊点模型的几何图形集名称,也可以将焊点模型几何图形集名称更改为“几何图形集.1”,总之二者要保持一致 。

代码调用与图形名称一致
3.宏对话框中选中“导出焊点坐标数据”宏,然后点击右侧的“运行”按钮 , 如果代码编写完全正确的情况下,稍等片刻Excel电子表格被自动打开,同时在表格中生成焊点坐标数据 。使用测量工具通过焊点坐标数据测量对机器人焊点数模坐标值进行测量并于导出的焊点坐标数据进行对比,可以看出二者数据相同,机器人焊点坐标数据被成功导出 。
导出的焊点坐标数据
三、创建导出焊点坐标数据工具条
1.点击“工具”菜单,在弹出的下拉菜单中点选“自定义”,然后在弹出的自定义对话框中点击“命令”标签,左侧的类别下选中“宏”,右侧命令下选中“导出焊点坐标数据”宏,点击下方的“显示属性”按钮,下方的命令属性区域中可以定义命令标题、用户别名、命令图标,命令添加后还可以在加速器后设置快捷键 。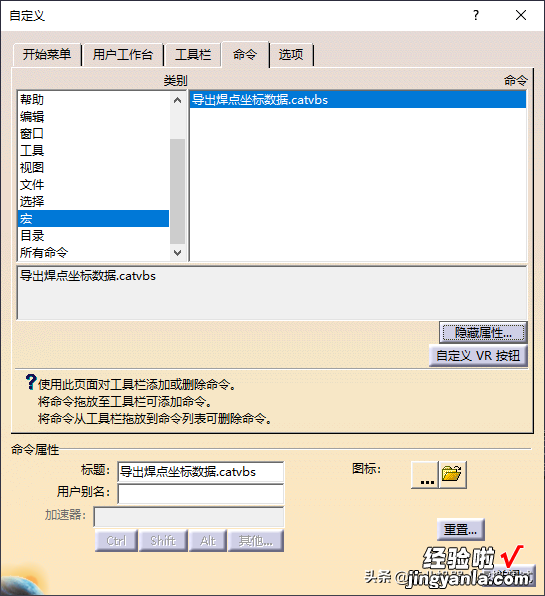
编辑宏命令
2.点击“工具栏”标签,右侧点击“新建”按钮 , 在弹出的新建工具栏对话框中输入工具栏名称(如宏命令),点击确定按钮 。然后在左侧工具栏下点选创建的“宏命令”工具栏,右侧点击“添加命令”按钮,在弹出的命令列表中选中“导出焊点坐标数据”命令,点击确定按钮,最后关闭自定义对话框 。
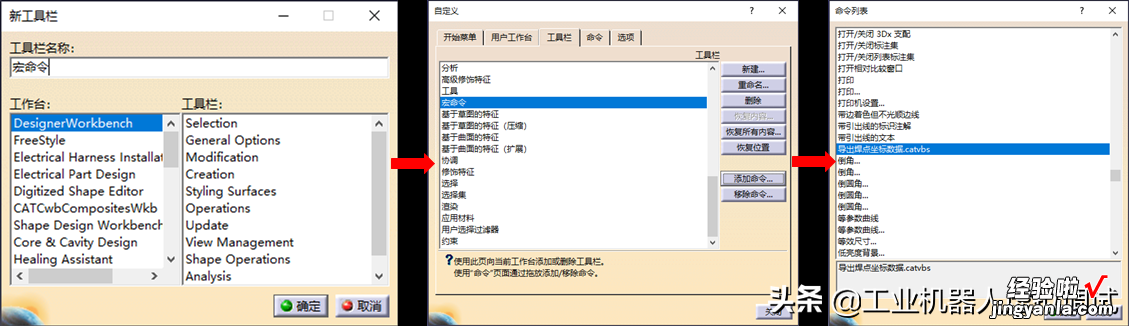
添加宏命令
3.可以看到宏命令工具栏出现在软件工作区中 , 同时工具栏中“导出焊点坐标数据”命令已经被添加,在进行导出机器人焊点坐标数据时直接点击此命令即可完成 。
【CATIA软件:基于宏命令的机器人焊点坐标数据提取】宏命令工具栏
The End
上一篇: